


How to improve car-sharing services with high accuracy indoor/outdoor geopositioning technology
IDNEO
A combination of GNSS and Wi-Fi opens new opportunities in the automotive sector
Nowadays, the advantages that GNSS geopositioning brings to our daily life are unquestionable. Vehicle navigation systems, services location on the surroundings, orientation during a mountain trekking, etc.. These applications work accurately on outdoor fields where good visibility of constellation satellites is available. On the other hand, the limitations of GNSS technology in indoor scenarios or urban canyons are well known and still without clear solutions that could provide enough accuracy in a scalable and affordable way. GNSS technology was improved by introducing the Galileo E5 signal; but as soon as the device to be localized enters the shadow zone, the problems appear.
GNSS challenges regarding Mobility
In the case of Automotive, accurate GNSS geopositioning is a must-point in order to establish effective V2X communications (V2X: Vehicle to Everything). Almost all of the standardized V2X messages include the geolocation of the vehicle. Vehicle position allows basic features such as presence notification of surrounding vehicles or pedestrians as well as other incoming advanced features such as maneuver coordination. In conclusion, poor accuracy geolocation could become a real blocker for level 4 and 5 Autonomous Driving, especially in densely populated areas where it is expected that Connected and Autonomous Vehicles (CAV) would play a key role in future mobility.
Another field of application is mobility services, including not only cars but also micro-mobility. These popular services include motorbikes, bicycles, and scooters, in their mechanical and electrical versions. The precise real-time location enables accurate geofencing services that could avoid the illegal parking of heavy vehicles on bike paths or limit the speed of electric scooters on pedestrian sidewalks. Other examples could be speed limitation, red light trespassing detection, etc.
BANSHEE project address two of the main geopositioning challenges that affect new Mobility deployments:
- Indoor positioning, providing a scalable and low-cost solution based on Wi-Fi access points that could be used as reference beacons.
- Urban canyons, a scenario with low GNSS visibility and random GNSS signals reflexed by the buildings. This difficult-to-manage phenomenon is known as multipath.
Multipath in urban canyons
One of the most sought-after location-based services (especially mobility) is stable positioning in urban environments. Despite the increase in the number of satellites and constellations (GPS, GLONASS, Galileo…) large positioning errors occur suddenly in urban environments. This phenomenon takes place mainly in high buildings areas. Basically, the GNSS signals used to calculate the Time-of-Flight (ToF) from satellites to receivers are reflexed in the walls. These reflections (also called multipath signals) increase the calculated distance and consequently add significant errors to the final position. Multiple factors could affect the ToF of a GNSS signal (for instance, signal propagation in the atmosphere, clock instability, orbital errors, or noise) that could add errors to the ToF calculations. However, most of them can be corrected at the receiver with suitable models. This is not the case with multipath signals because the error is dependent on the environment.
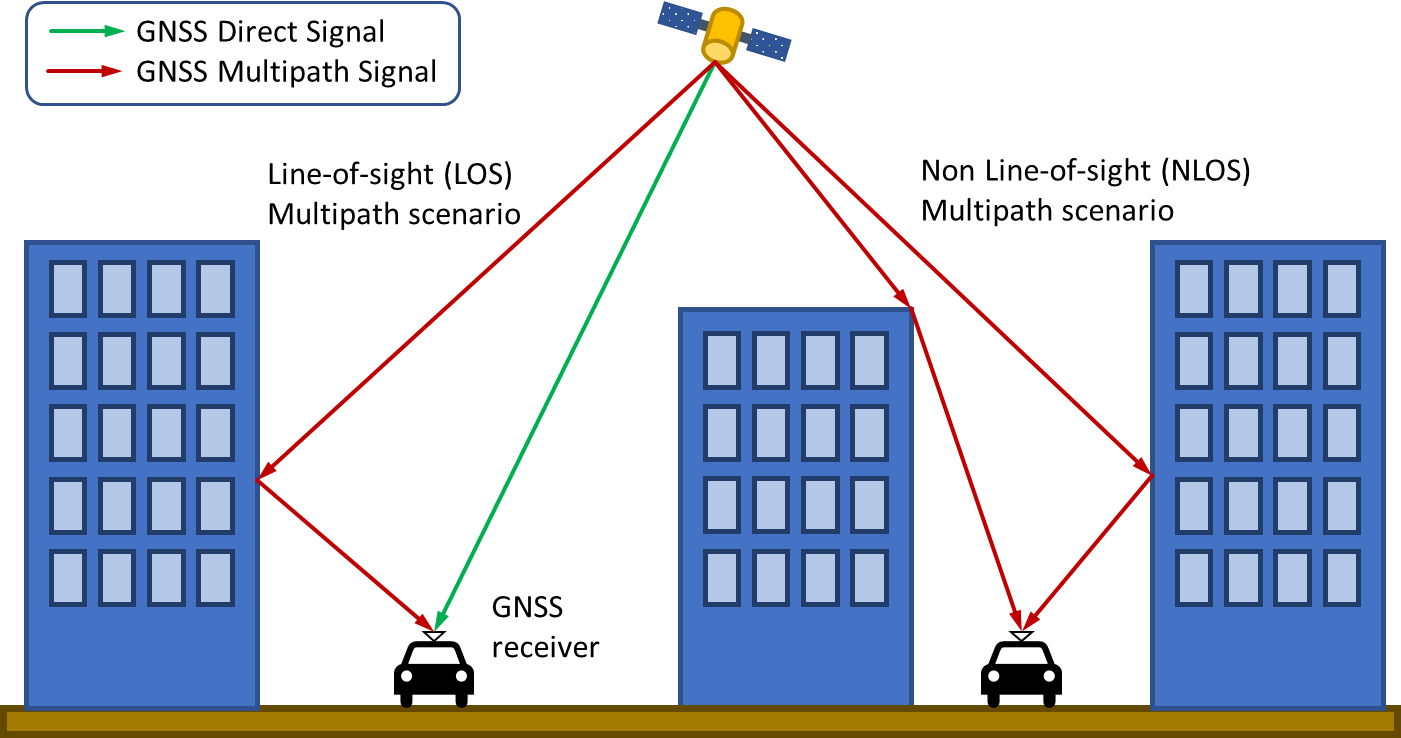
Commonly, there are defined two multipath scenarios:
- The Line-of-Sight (LOS) scenario. In this scenario, the GNSS receiver has a direct view of a satellite and, at the same time, it receives a multipath reflected signal. In this case, the error is only a few meters at most, and the maximum error has an upper limit.
- The Non-Line-of-Sight (NLOS) scenario. In this situation, the GNSS receiver only has indirect views of the satellite just receiving reflections from the buildings. In this case, the magnitude of the error depends on the environment, and the maximum error cannot be defined. Figure 1 shows both scenarios.
To improve GNSS reception in urban canyons, numerous approaches are been investigated in order to mitigate multipath signals, such as
- Defining models for multipath errors, using different types of filtering in order to detect multipath signals by looking at their physical parameters. I.e.: signal noise ratio (SNR).
- Using a 3D model of the urban canyons or installing additional sensors, such as fish-eye cameras or real-time laser scanning.
- Estimation and correction of NLOS multipath errors.
- Suppression of NLOS reception in the RF module of the receiver.
- NLOS multipath classification using Machine Learning methods.
Although the results for these approaches are remarkable, there are some points that prevent to use of them in a massive way: system complexity, computing effort, high cost, size, etc. BANSHEE project develops a low-cost and scalable proposal for urban canyon navigation that aims to become a de-facto standard.
Indoor navigation
This is another challenge for the near future Mobility. In a scenario with no visibility of GNSS satellites, it is mandatory to use auxiliary technologies to localize vehicles. Currently, it is usual to use the “dead reckoning” method based on inertial sensors. In this way, based on an initial highly accurate outdoor geolocation, the offset can be estimated using the displacement of the GNSS receiver itself. However, position error increases while the receiver moves. Consequently, the dead reckoning method is considered just a mitigation method for short distances. The ideal for indoor navigation is the use of beacons that offer alternative references to the navigation receiver. Unfortunately, there is no open and popularized standard to perform this task. Some potential technologies are available, such as Bluetooth Low Energy (BLE) or Ultra-Wide Band (UWB). All of them need the deployment of dedicated devices inside the places to be indoor navigated, so it is mandatory a remarkable investment and an initially calibrated localization for each beacon. Additionally, their future popularization and standardization are not clear, so the scalability of these technologies is uncertain.
BANSHEE project proposes to use Wi-Fi Access Points (WAPs), commonly named “routers”, as reference beacons. The WAPs beacons would enable numerous quantity of use cases such as indoor parking geolocation, indoor carsharing services, or critical applications such as tunnel monitorization.
Technology and solution
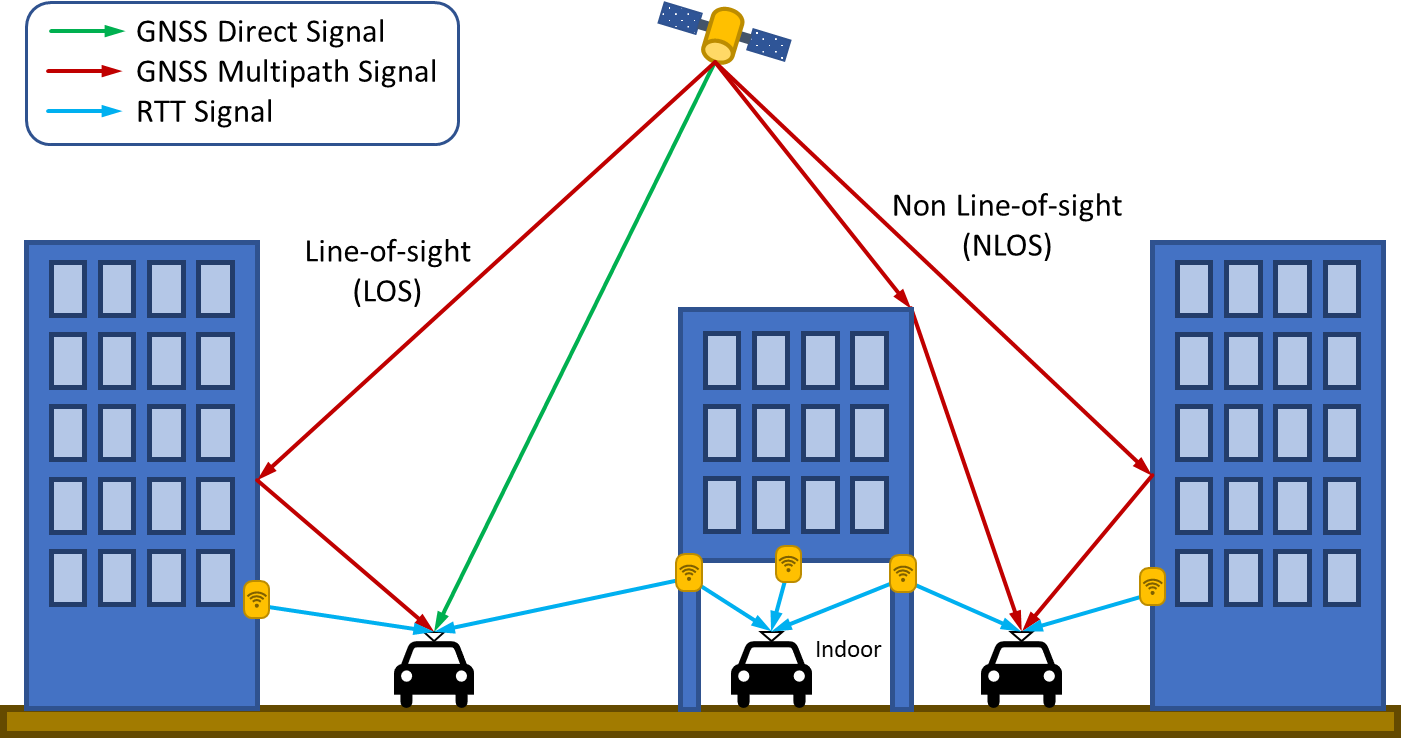
The idea is to use Wi-Fi Access Points (WAP) as radio beacons calculating the Time-of-Arrival (ToA) of the signal, taking advantage of the new 802.11mc protocol. This Wi-Fi-calculated location is combined with the GNSS position looking for accuracy maximization. The Wi-Fi 802.11mc Time-of-Arrival is commonly referred to as Round Travel Time or RTT. Figure 2 it is shown some examples of scenarios combining GNSS multipath signals and RTT Wi-Fi signals.
Wi-Fi 802.11mc Round Travel Time (RTT)
Current wide-spread operational positioning solutions based on Wi-Fi use Received Signal Strength (RSS) measurements. This kind of Wi-Fi ranging is vulnerable to propagation attenuation in the transmission environment with the result of poor accuracy result (order of ten meters). The step beyond the state-of-the-art is the new 802.11mc protocol, actively supported by companies such as Google (from Android version 9) or Intel (Wireless-AC 8260 chipset).
The location procedure presented in IEEE 802.11mc it is based on measuring the Time of Flight (ToF) of a signal exchanged between two network devices (either regular stations or APs). Due to the non-synchronized nature of IEEE 802.11 networks, this TOF needs to be measured in a Round Trip Time (RTT) fashion.
This RTT ranging procedure has to be repeated in at least 3 different responding stations to obtain a 2D position and 4 stations to obtain a 3D positioning. 802.11mc protocol does not require any association with WAPs so in urban scenarios it is supposed to have enough APs to perform calculations. Then, a regular multilateration algorithm could be used to determine the position with some meters’ accuracy. There exist other radio beacon technologies that use similar techniques such as Ultra Wide Band or Bluetooth Low Energy. However, these technologies require the installation of dedicated beacons to provide measurements, a real blocker point to the goals of affordability and scalability.
The RTT procedure uses the same antennas as data traffic, so the same WAP is used to geolocate receivers and transmit data.
GNSS + RTT Hybridization and inverse positioning
As already mentioned, BANSHEE provides geo-location by hybridization of RTT ranging measures + GNSS Galileo E5 signals. In the case of GNSS, the global reference is provided by the satellite constellation. However, RTT ranging provides relative distances between 802.11mc devices. Therefore, it is needed to calculate WAP’s absolute position in order to calculate global referenced positions for the receiver. This procedure is known as “inverse positioning”.
BANSHEE technology calculates the absolute position of Wi-Fi APs using a scalable and operator-free procedure. The GNSS + RTT hybridization takes place using two key software components of the BANSHEE system.
- Software Development Kit (SDK), a library that performs the GNSS + Wi-Fi range hybridization to estimate the receiver’s location. This library will run on the client side, wrapped in a smartphone app or executable within a GNSS receiver.
- Application Programming Interface (API) that will run on a server. The SDK will require the location of the WAPs in view in order to successfully compute the position of the receiver. This component will have a two-fold functionality: (a) accept GNSS + Wi-Fi ranges to compute the location of the WAP and (b) serve the location of that WAP to receivers.
As a result, the location of a newly installed RTT WAP will be calculated just by interacting with other 802.11mc devices. Once the WAP location is estimated, they are stored in the remote server database. Then, a receiver that wants to obtain location using both GNSS and Wi-Fi ranges will need the location of the GNSS satellites as well as the location of the WAP in view, which will be obtained by querying the remote server via the API.
Using this approach, it is expected to achieve the goals of 1-meter error accuracy in benign urban scenarios (outdoor GNSS + RTT), < 5-meter error in mild indoors, (GNSS + Wi-Fi within a building near windows), and < 3 m error in the determination of the Wi-Fi AP location.
Priority market segments
BANSHEE technology aims to close the indoor gap of navigation systems working in Smart Cities. The target verticals are Location Based Services and the Automotive sector. We will focus on the automotive sector in this article.
Automotive sector

Connected and Automated Vehicle
Vehicular communications is an emerging technology that will be present soon in the mobility scene. The vehicle-to-everything (V2X) protocols are highly dependent on a highly accurate position. This is not a problem for benign outdoor zones such as highways. However, the situation drastically changes in the case of urban canyons, covered parking, or safety-critical places such as tunnels.
To ensure successful CAVs deployment in smart cities, it will be needed accurate indoor/outdoor geolocation technologies such as BANSHEE. The scalability of the hybrid geolocation system is the main key point for successful CAM deployment. In the end, the regulator organisms, such as city majors, decide the most convenient support systems. BANSHEE is a peer-to-peer system that could be easily deployed with the municipal Wi-Fi infrastructure. Even private WAPs could support the geolocation tasks at building edges and indoor places.
The main goal of GNSS multipath mitigation at urban canyons is achieved with BANSHEE, ensuring enough accuracy and, most importantly, avoiding sudden changes in calculated received location. This allows a smooth operation of V2X vehicular communications enabling a wide range of C-ITS services, such as warning alarms, traffic orchestration, cooperative perception services, and so on. In addition, it exists room for accuracy improvement in the next years.
Carsharing services
When talking about Connected and Autonomous Vehicles, we are referring to several years before their effective deployment. In contrast, right now exist a Mobility use case that would take a real advantage using BANSHEE technology: carsharing services. The idea is to share a collective car between a lot of users. Usually, reservations and even the door unlock are related to the user’s smartphone location and the car location itself. As previously commented, indoor and urban canyons scenarios difficult the operation of GNSS receivers. BANSHEE will enable numerous carsharing services, enhancing the user experience and popularizing carsharing.
A good example is to provide an accurate location for indoor parking. In most cases, a shared car has assigned a specific parking place. In the case of electric-shared cars, this point is mandatory, due to the need for charging infrastructure. Current cities have outdoor parking shortages, so enabling indoor parking for carsharing is a must to a successful deployment of carsharing services. This objective matches with the tendency to difficult the entrance of private cars in the cities to recover the available space to the citizens and promote healthier ways of mobility. Another good example is a service to guide the user to the right place where the vehicle is located at the indoor parking. With BANSHEE both user and vehicle locations are ensured for indoor scenarios in an affordable and scalable way. The parking operator just needs to upgrade their WAPs infrastructure. Even when the user is near the car could be determined if he is located near the driver’s door or the car’s boot.
Critical services
Another indoor critical service is vehicle monitoring inside tunnels. This kind of infrastructure has an inherent risk, due to the high impact in case of an accident inside the tunnel. A combination between the BANSHEE indoor location and vehicular communications would provide information about the kind of vehicles trapped in a tunnel during an accident and, most important, where they are located to rescue them. Additionally, it could enable filtering services tunnel entrances banning for dangerous good trucks of other risky vehicles.
Conclusion
BANSHEE technology allows a high accuracy indoor/outdoor geolocation by using GNSS + Wi-Fi positions hybridization based on Galileo E5 signals and the 802.11mc protocol. This protocol, commonly known as Round Travel Time (RTT), calculates the Time of Flight of Wi-Fi signals to estimate distances to the Wi-Fi access points. The Wi-Fi AP global positions are determined with an operator-free procedure that ensures the scalability of the technology. RTT is an affordable solution based on widely used Wi-Fi. Besides, it’s actively supported by major stakeholders such as Google or Intel. These characteristics make BANSHEE an ideal geolocation solution for incoming mobility services.